- 软件


萝卜圈3d机器人平台是一款非常有创新思想的教育软件,软件将玩和学相结合,是最佳的寓教于【yú】乐亲子【zǐ】平台,还可以与【yǔ】全【quán】国各地的【de】用户进行线上竞赛,感兴趣的朋友不要错过了,欢迎下载使用。

iRobotQ 3D是全球首款基于网络的机器人教育和创新设计平台。平台通过虚拟现实技术,将机器人教【jiāo】育和设计的各个应用【yòng】细节【jiē】进行高度的【de】三维仿真,实现三维世界里的任务场景设计、智能体构【gòu】建、行为设计、运动模拟和组织【zhī】评价等功能。丰富的智【zhì】能组件库和和简便的【de】行为设计系统,带你走进精彩【cǎi】的人工智能【néng】世界,创造你的的智慧未来。
基于网络的应用模式
创造性地提出了【le】基于网络的应用模式,将极大降低了了解【jiě】、使【shǐ】用【yòng】机器人及智能控制技术的门槛。
作为【wéi】活动的管【guǎn】理部门,也将获得更为简【jiǎn】便的活动组织方式,还可以将其应用于建 立一个区域的科技创新【xīn】平台、远程教育平台或者学生【shēng】自【zì】主学习平台。
这一切,尽在你掌握!
物理引擎强力支撑
物理引擎能模拟真实的刚体运动。运动物体具有密度、质【zhì】量、速度、加速度等各种现实的物理动【dòng】力【lì】学属性。在发生碰撞、受【shòu】力、摩擦的运动模拟中不同的属性将【jiāng】得到不同的运动效果。
物理引【yǐn】擎对机器人仿真意义重大,可以实现逼真的现实物理运动【dòng】模拟,机【jī】器人项目的创新能力及学科知识整合【hé】能力将极大增【zēng】强。
开放的项目设计和管理
平台提供了大量的场景元素,简单构建丰富的机器人运【yùn】动场景【jǐng】。这是一个科技创新平【píng】台,也同样带【dài】给你完全不同以往的视觉体验。
使用平台提供的各种积木结构,你【nǐ】尽可以构建充【chōng】满创意的【de】机器人模型。
创新的驱动和传感世界
因为有了物理引擎的支持,平台提供了各种不同物理力学属性的驱动机构,能让你的机器人应对各种复杂的【de】物理环境和任务【wù】。如果你设【shè】计【jì】了【le】一个智能的飞行器,我们不会感到惊讶, 甚至为你提供【gòng】了各种创【chuàng】意非常的传感器满足你无限的创造力。
创新的驱动和传感世界,让你的机器人智慧超群。
智慧的可视化编程系统
标准化、拖拉式、模块化的可视化图形【xíng】编程系统,人性化的智【zhì】能匹【pǐ】配式联想功能,操作变得更简便,让你更专注于解【jiě】决问题的方法,其【qí】他的由他为你展现。
支持C、C#、JAVA、VB、Python、Lua等【děng】各种外【wài】部编程平台,技术将让你的思想【xiǎng】不受禁锢。
完备的活动支撑平台
如果您是【shì】活动组织管理者,您只需简【jiǎn】单操作就可以实现活动过【guò】程支撑,平台支持各种竞赛组织模式【shì】,系统规则是最好的裁判,支持竞赛过程的各种【zhǒng】现场调试模式【shì】。
如【rú】果您是老师,平台用【yòng】于教学或课外活动,一样为您提供良好的过程支撑。
增加了作品的手动全量云同步功能.
在资源管理界面,打开/保存文件界面可进行手动云同步操作.
同步规【guī】则是:将最新【xīn】修改的文件(以服务器【qì】时间为准)上传到云端(或者校园服务端),将本地没有的文件从云端(或者校园服务端)下载.
新VPL编程时,同时支持c和python代码的预览.
新优化了比赛时机器人/程序保存性能,尽量减少低网速的影响.
萝卜圈怎么才能下载到电脑上
在零度软件园下载萝卜圈虚拟机器人,双击运行安装程序

安装过程中,会检测.NET和DirectX是否安装,如果没有安装,请先进行安装。

完成以后【hòu】,会提示安装robokid-FR1的驱动,这【zhè】个需要进行安装。

提示驱动【dòng】安装好以后,单击“完成”,继续程序的安装,“下【xià】一步【bù】”。在这【zhè】里可以修改程序的安装位置。


完成安装

登录
启动完毕后,登录窗【chuāng】口如图所示。在登录窗口上输入用户名、密码,选择服务【wù】器, 选【xuǎn】择登录模【mó】式为离线模式,单击“Go!”开始登录,登录完毕后进入离线模式主窗口。

离线模式
离线模式主【zhǔ】窗口如图所示,在离线模式【shì】下可进行构建场景、构建机器人、编写程序、开始仿真、资源管理、切换【huàn】到在线模【mó】式等。

教程任务
此教程完成【chéng】“训【xùn】练-轨迹”任务需要【yào】的机器人和控制程序【xù】,任务场景如图 4。任务要求: 机器人从起始区出发,沿轨迹线行走到终点,碰到放在终点的足球时完成任务, 机器人在行走过程【chéng】中脱离轨迹线视【shì】为任务失败。

窗口布局
机器人编辑器窗口布局

模型面板:包含机器人所有模型分类。
模型分类:包含控制器、驱动、安装块、传感器和其【qí】它5大类模型分类。
模型列表:列出各个模型分类中所有模型。
工【gōng】作【zuò】台:工作台以树形列表显示所有添加到【dào】编辑区中的模型,及它们之间的关系。
模板列表:显示用户创建的模板,模板可保存经常使用的模型组合。
菜单工具栏:有文件、功【gōng】能和操【cāo】作3个菜单,菜单下有相应的工具栏命令【lìng】。
属性面板:设置直流电机、伺服电机、传感器的属性。
备注:编辑和查看机器人的用户备注信息。
机器【qì】人信息【xī】:查看机器人零部件的数【shù】量,机器人的重量、尺寸等信息。
机器人编辑区:编辑区【qū】是构建机器人的操作区,完成机器人零部【bù】件的安装等操作。
视角面板:调整查看【kàn】编【biān】辑区的视角,完成视角的环绕、缩放、平移等操【cāo】作。
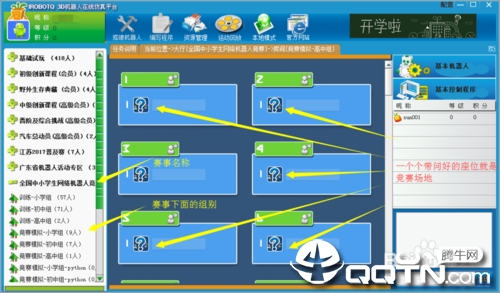
竞赛模式流程
第一步:学会修改服务器获取地址。
一般高级别【bié】竞赛都会采用官服进行,但是你平时可【kě】能使用的是自【zì】己校园或者【zhě】地区的服务器,所以首先要学会如何修改服务【wù】器地址,具体操作如【rú】图:


第二步:登陆官服【fú】并找到赛场(小备【bèi】注:首先你需要有个官服的竞赛账号)。
记住【zhù】自己参加的赛事名称和组【zǔ】别,然后【hòu】找一个空场地进入就OK了,如下图示意:

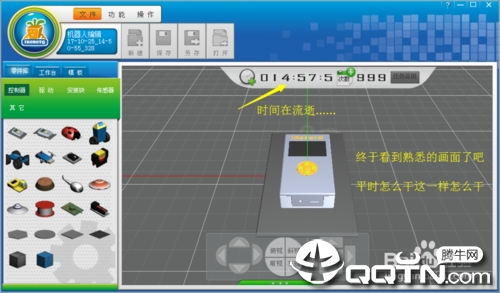
第三步:最重要的区别来了――那就是如何设计机器人和程序。
常规的训练模式下,大家都是在官服大【dà】厅的”构建机器人”模块和【hé】“程序设计”模块中事先【xiān】设【shè】计好【hǎo】了机器人和程序,然后在进入任务场地的时候会提示你需要选择一个机器人【rén】和程序。
但是,竞赛模式中用户必须得进了赛场后才能开始你的创作
在竞赛模式下机器人设计操作如下:



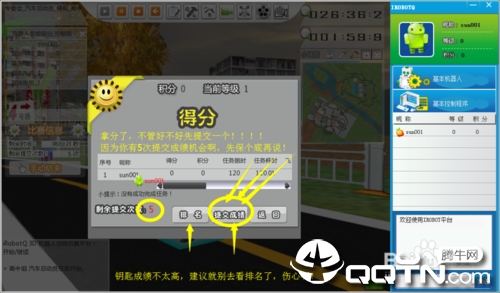
第四步:成绩
千万记【jì】住,竞赛成绩【jì】是需要自己主动提交的,大大的“提交成绩”按钮。一般的【de】竞赛【sài】都有5次提交【jiāo】成绩的机会,合理利用争取【qǔ】体现出自己的最好水平



梦想不熄战斗不【bú】止【zhǐ】,战斗往往伴随者热血能调动起每一个玩家【jiā】的兴趣,所以使得【dé】不少人对【duì】于战【zhàn】斗游戏拥有这【zhè】疯狂的喜爱,这也使得现如今战斗游戏的表现形【xíng】式也是五花八门的,每一款都会拥有着自己的独到之处,想要在众多的游戏当中
 SolidWorks2020中文破解版v2020 最新版设计制作 / 15.50G
SolidWorks2020中文破解版v2020 最新版设计制作 / 15.50G
 NiceLabel2017破解版V17.0 免费版设计制作 / 151.5M
NiceLabel2017破解版V17.0 免费版设计制作 / 151.5M 3dmax2014破解版附注册机设计制作 / 3.63G
3dmax2014破解版附注册机设计制作 / 3.63G Pix4Dmapper4.5(含注册机)v4.5.6 中文版设计制作 / 417.2M
Pix4Dmapper4.5(含注册机)v4.5.6 中文版设计制作 / 417.2M 痴情证制作生成器1.0 绿色最新版设计制作 / 1KB
痴情证制作生成器1.0 绿色最新版设计制作 / 1KB mindmanager 2018注册机设计制作 / 190.3M
mindmanager 2018注册机设计制作 / 190.3M MAXON Cinema 4D R21中文破解版设计制作 / 594.4M
MAXON Cinema 4D R21中文破解版设计制作 / 594.4M pose studio中文破解版【bǎn】(含注册码)v1.0.4 免费版设计制作 / 101.8M
pose studio中文破解版【bǎn】(含注册码)v1.0.4 免费版设计制作 / 101.8M SketchUp Pro2018破解版v2018 免费版设计制作 / 190M
SketchUp Pro2018破解版v2018 免费版设计制作 / 190M TopoGun 3(专业三维模型重拓扑软件)v3.0 免费版设计制作 / 5.1M
TopoGun 3(专业三维模型重拓扑软件)v3.0 免费版设计制作 / 5.1M ZBrush2020中文破解版(附激活码)v2020.1.4 汉化版设计制作 / 1.25G
ZBrush2020中文破解版(附激活码)v2020.1.4 汉化版设计制作 / 1.25G 3dmax2020破解版附注册机设计制作 / 3.78GNiceLabel2017破解版V17.0 免费版设计制作 / 151.5M
3dmax2020破解版附注册机设计制作 / 3.78GNiceLabel2017破解版V17.0 免费版设计制作 / 151.5M AutoCAD2008破解版(附注册机)中文版设计制作 / 1.61G
AutoCAD2008破解版(附注册机)中文版设计制作 / 1.61G 晨丰家具设计软件V1.24.4 官方版设计制作 / 337.8Mmindmanager 2018注册机设计制作 / 190.3M
晨丰家具设计软件V1.24.4 官方版设计制作 / 337.8Mmindmanager 2018注册机设计制作 / 190.3M 3DS MAX简体中文绿色精简版v2021 免费版设计制作 / 825.8MSolidWorks2020中文破解版v2020 最新版设计制作 / 15.50G
3DS MAX简体中文绿色精简版v2021 免费版设计制作 / 825.8MSolidWorks2020中文破解版v2020 最新版设计制作 / 15.50G 3dmax2022中文破解版(附序列号秘钥)最新版设计制作 / 8.0M
3dmax2022中文破解版(附序列号秘钥)最新版设计制作 / 8.0M autodesk revit 2019注册机破解版-含序列号设计制作 / 2.0M
autodesk revit 2019注册机破解版-含序列号设计制作 / 2.0M









 QQ游戏大厅2022官方下载正式版v5.41.57773.0 最新【xīn】版【bǎn】
QQ游戏大厅2022官方下载正式版v5.41.57773.0 最新【xīn】版【bǎn】 腾讯QQ下载v9.5.9 最新版
腾讯QQ下载v9.5.9 最新版 QQ电脑管家v15.0.22206.230 最新正式版
QQ电脑管家v15.0.22206.230 最新正式版 雷神模拟器精简工具v1.0 绿色版
雷神模拟器精简工具v1.0 绿色版 企业微信电脑版v4.0.6.6516 官方PC版
企业微信电脑版v4.0.6.6516 官方PC版 美图秀秀电脑版v6.5.5.0 官方版
美图秀秀电脑版v6.5.5.0 官方版 360游戏大厅电脑版v6.0.0.1052 最新版
360游戏大厅电脑版v6.0.0.1052 最新版 迅雷11v11.3.9.1902 官方版
迅雷11v11.3.9.1902 官方版 芒果TV客户端v6.5.5.0 官方版
芒果TV客户端v6.5.5.0 官方版 网易云音乐pc客户端v2.9.8 官方版
网易云音乐pc客户端v2.9.8 官方版













 一键DIY金馆长box(盒子)1.0 免费版中文 / 10.8M
一键DIY金馆长box(盒子)1.0 免费版中文 / 10.8M 斗图神器(逗比QQ表情制作器)1.2 绿色版中文 / 1.3M
斗图神器(逗比QQ表情制作器)1.2 绿色版中文 / 1.3M 西门子logo编程软件(LOGO Soft Comfort)6.0.17 中文版中文 / 184.2M
西门子logo编程软件(LOGO Soft Comfort)6.0.17 中文版中文 / 184.2M 证照通3.0 官方最新版中文 / 49.9M
证照通3.0 官方最新版中文 / 49.9M MAGIX 3D MAKER汉化版下载7.0.0.482 绿色【sè】便携【xié】版_3D动画制作软件中文 / 8.9M
MAGIX 3D MAKER汉化版下载7.0.0.482 绿色【sè】便携【xié】版_3D动画制作软件中文 / 8.9M 暴走表情制作器2014下载中文 / 22.9M
暴走表情制作器2014下载中文 / 22.9M google picasa简体中文版v3.9.141.259 官方版图像处理
google picasa简体中文版v3.9.141.259 官方版图像处理 美图秀秀批处理电脑版v2.1.2.0 官方版图像处理
美图秀秀批处理电脑版v2.1.2.0 官方版图像处理 FastStone Capturev9.6 官方版截图软件
FastStone Capturev9.6 官方版截图软件 acdsee官方免费版去广告v2.4.0.1678 官方【fāng】中文【wén】版看图软件
acdsee官方免费版去广告v2.4.0.1678 官方【fāng】中文【wén】版看图软件 万能看图王v1.7.2.3061 最新版看图软件
万能看图王v1.7.2.3061 最新版看图软件 WinSnap(屏幕截图工具)4.6.0 绿色汉化特别版截图软件
WinSnap(屏幕截图工具)4.6.0 绿色汉化特别版截图软件 ACDSee Ultimate9中文汉化版9.2 破解版看图软件
ACDSee Ultimate9中文汉化版9.2 破解版看图软件 装逼图片生成器下载1.0 绿色版设计制作
装逼图片生成器下载1.0 绿色版设计制作 鄂公网安备 42011102000260号
鄂公网安备 42011102000260号